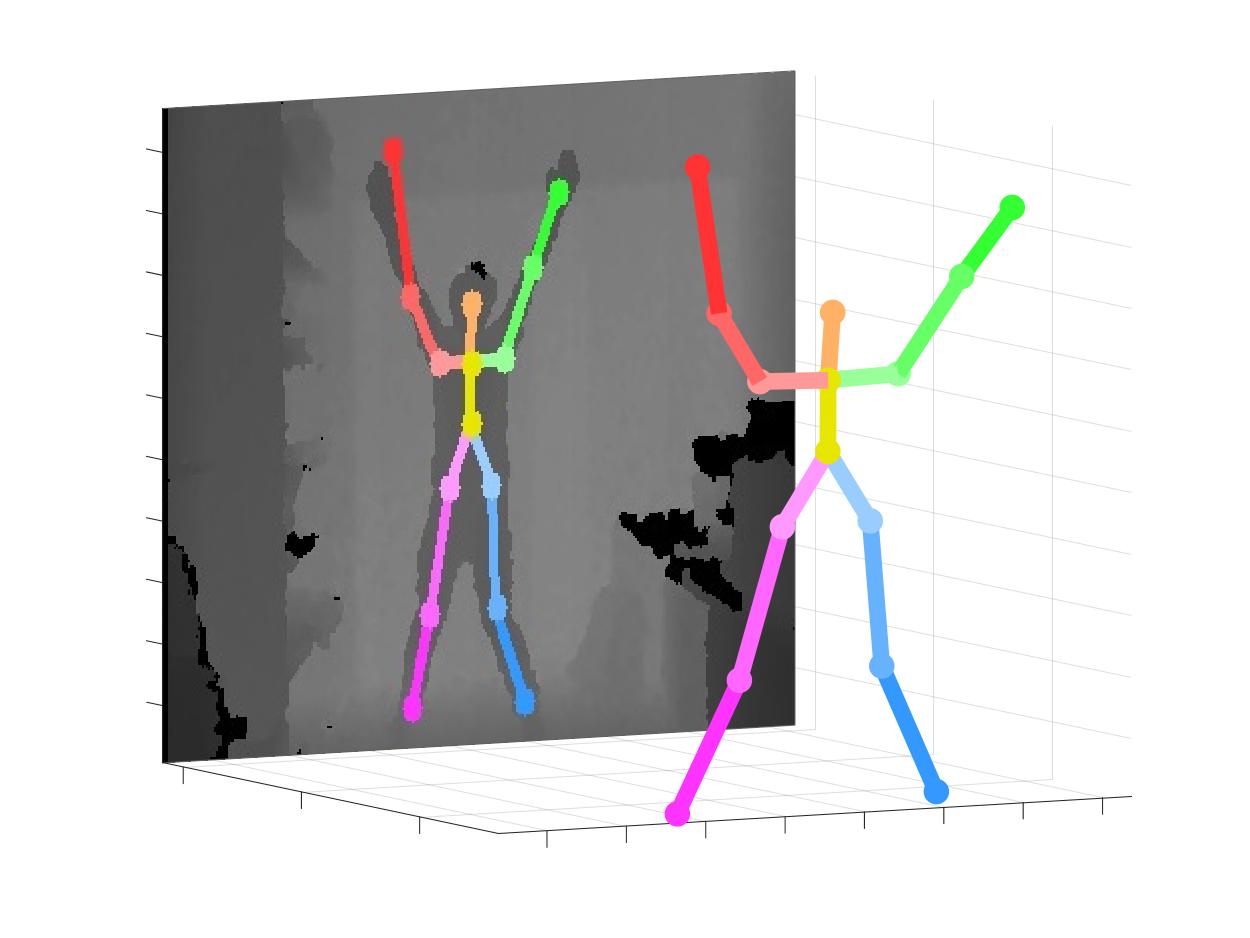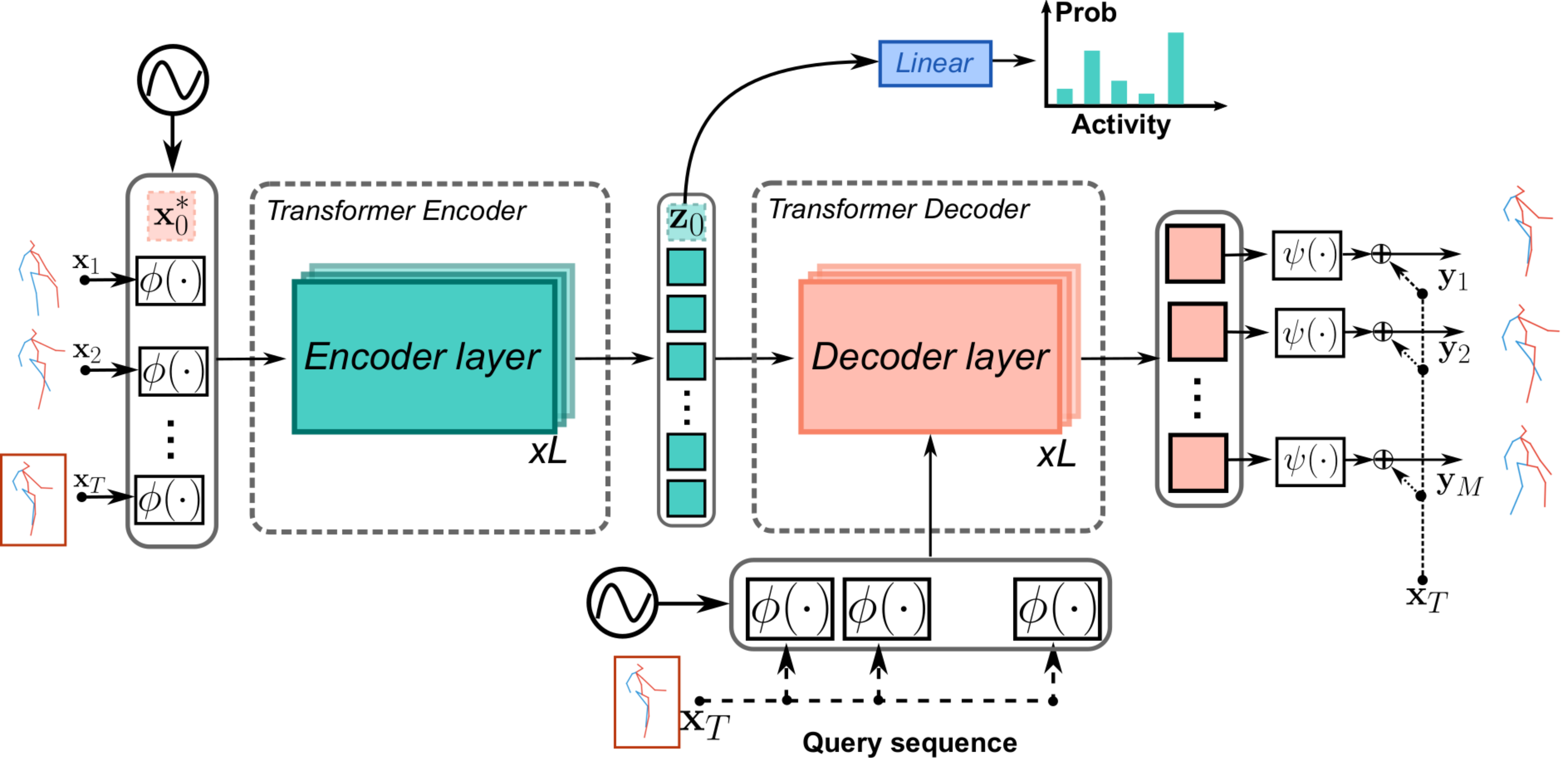
Pose Transformers: Human Motion Prediction with Non-Autoregressive Transformers
IEEE/CVF International Conference on Computer Vision, 2021
paper · project page · poster
A new non-autoregressive Transformer architecture to predict 3D human motion and activities.